Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
Imagine that small robotic bees have rumors around the wildflower field, helping real bees to fulfill their important pollinated duties in the future. This is a vision that is the microbotics laboratory of Harvard Has been working over the yearsThe Barrier? Until recently, Harvard Robby was the only landing of crash landing.
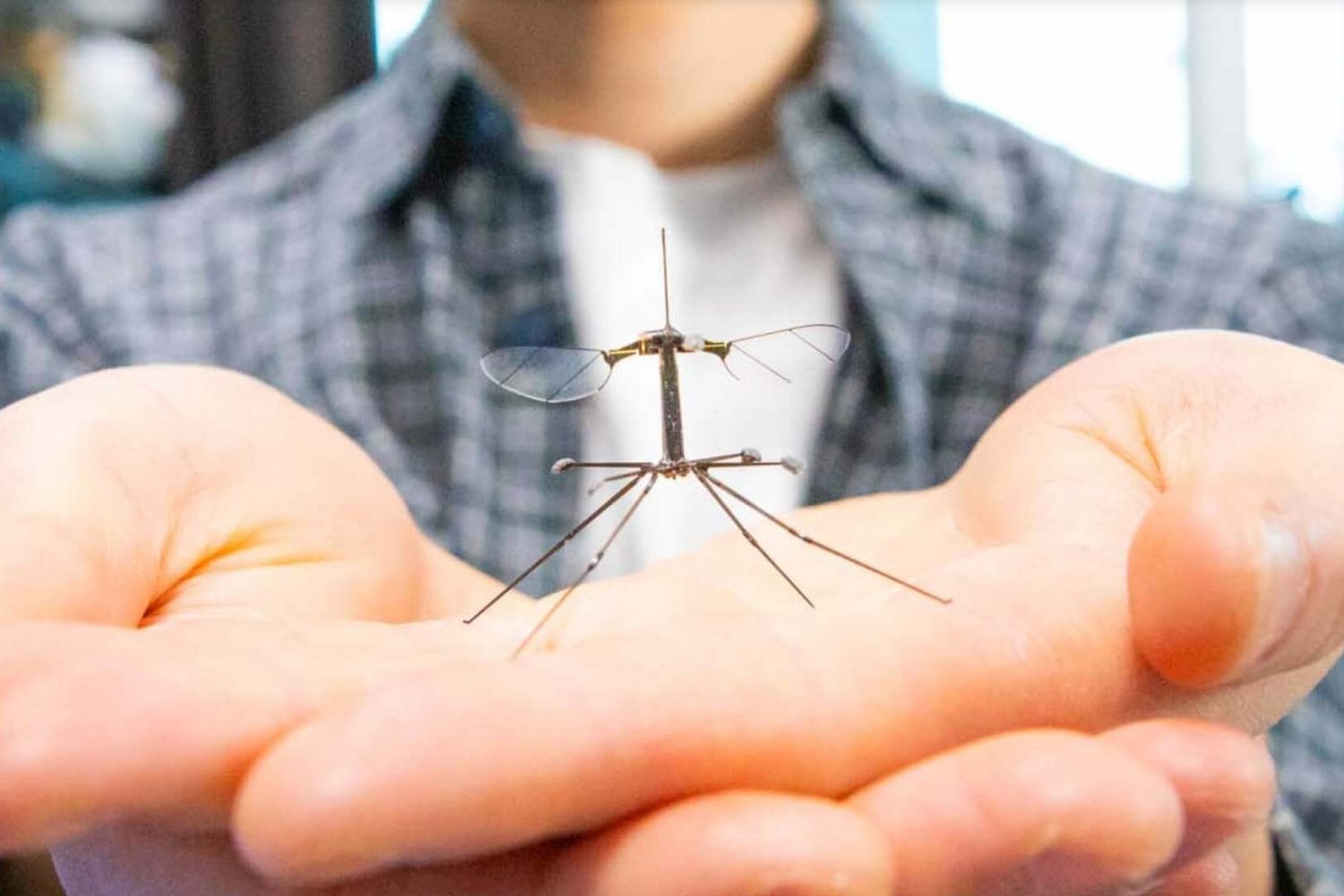
Harvard researchers have now decorated four long, compassionate landing, inspired by the Crane Fly Leg, with their tiny Robo. (Crane flies are that nightmare but innocent insects that flying spiders and people usually identify as giant mosquitoes). Such as a Study Published on Wednesday in the Journal of Science Robotics, a soft landing brings a step closer to the practical applications of Robobi, which seems like environmental observation, disaster surveillance, artificial pollination, even fine organisms outside of Science-Fi movie.
Harvard University’s School of Engineering and Applied Sciences and Research Co-authors, a Harvard’s PhD student Christian Chan, “Before that, we would just leave the ground and just drop it and pray,” StatementThe

Chan and his colleagues, led by Harvard Professor of Engineering and Applied Sciences, sought inspiration for a new landing design in the university’s comparative zoology database museum. They finally chose the crane fly to chose the morphology, decorating four long, attached legs for a soft landing. The update included an advanced controller (the brain of the robot) to reduce the landing method of the minor robot. As described in the statement is now a “gentle plop-down” as a result of the combination.
The previous versions of Robby struggled to make a controlled landing because the air varieties generated from its flapping wings created restlessness near the ground. It is appropriately a problem known as “Ground Effect” that helicopters also experience. It weighs 0.004 ounces (1/10th of a gram) and its wings measure only 1.2 inches (3 cm) without more challenging for Robby.
“The successful landing of any flying vehicles depends on the effect of the effect because it moves towards the surface before the effects and abolished energy after the effect,” Harvard Postdotoral Fellow and now the Assistant Professor of Pardu University’s School of Electrical and Computer Engineering explained Nose-Sing Patrick Hune. “Even with the small wing flap of Robobi, the ground effect is non-neglected while flying near the surface and the effects can be worse as it bounces and bounces.” Hune led a strong surface like real insects and on a page and led by Robbie’s landing test.

The crane fly legs and updated controllers also protect Robobby fragile pizzoilactric acuters – the equivalent of a small robot of an insect muscles. Researchers explained in the study, “The initial defects of Pijolectric Acuters for Microbots are their fragility and low fracture scenes.” “Out of the crash landing, loyal legs help to protect the subtle pizolectric acuters from the collision-enclosed fractures.”
After moving forward, the team’s goal is called “a three-way holy grale” in control of Robby sensors, energy and autonomy, which will bring its seemingly undeniable practical applications closer to real.

